问答:关于ABB机器人之间的DEVICENET通讯
发表时间:2023-10-19 09:07
有些小伙伴对ABB机器人的导入以及ABB机器人之间的DEVICENET通讯还有些疑惑,这里将一一解开你们的疑惑。 今日互动问答
工业机器人小白 问: 想问一下有没有人知道ABB机器人用的robotstdio导入工具模型需要什么类型的数据,还有就是如果导入的是.stl类型的数据会怎么样?
邵阳职院工业机器人技术应用中心 答: 正常情况下软件上所支持的格式都能导入。.stl应该也是可以的,但是我没试过。我一般用STEP的中性居多,但是现在用的6.06.01版本的时候可以直接导入SW2016的零件跟装配体,自带染色效果非常不错。
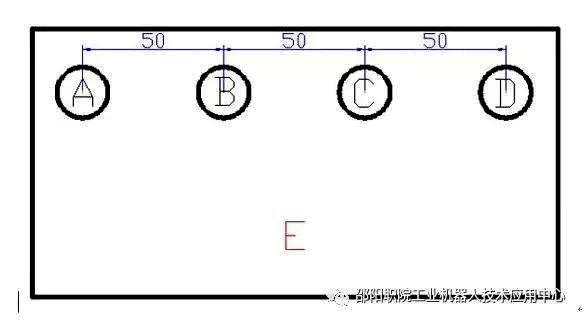
工业机器人小白 问: 怎么用程序编写。把ABCD四个20mm物体搬移到E处。进行码垛。谢谢大佬了。
邵阳职院工业机器人技术应用中心 答: XYZ三坐标机械手+夹爪,去ABCD,坐标抓取--放到E坐标就行了。具体步骤如下:
每次下降高度,都要按包装高度递增,这样就堆垛4层到E位了。
工业机器人小白 问: 情况如下,三台2400倒挂机器人切割工作站(配置见附件),使用IO板和PLC进行通讯,三台机器人同时切割一个工件,工件号由PLC通过IO点同时传给三台机器人,由于IO点数量限制,机器人读到的工件号没有反馈值,因此我想通过机器人的内部DEVICENT总线来完成三台机器人的内部信号通讯,不知是否可行?
邵阳职业技术学院工业机器人技术应用中心 答: 可以将一台机器人做为DEVICENET的站,其它两台做为从站,通过DEVICENET进行通讯.
|
|